
https://arxiv.org/pdf/2308.04079 - Bernhard Kerbl, Georgios Kopanas, Thomas Leimkuhler, George Drettakis
Abstract
기존 Radiance Field (NeRF) 기반 방법은 고화질 뷰 합성은 가능하지만, 느리고 무거운 학습 비용과 실시간 렌더링 불가라는 한계가 있음.
본 논문은 1080p 해상도에서 30fps 이상의 실시간 렌더링과 SOTA 수준의 화질을 동시에 달성하기 위해 다음 세 가지 핵심 요소를 도입:
- 3D Gaussian Representation
- 카메라 캘리브레이션으로 얻은 sparse point로 초기화
- 불필요한 빈 공간의 계산을 줄이고 연속적인 radiance field의 장점을 유지
- Interleaved Optimization & Density Control
- 공분산 최적화 (anisotropic covariance)
- 필요에 따라 Gaussian을 추가/삭제하여 장면을 정확하게 표현
- Fast Visibility-Aware Rendering
- Visibility-aware anisotropic splatting
- 학습과 렌더링을 동시에 가속화 → 실시간 렌더링 가능
이 방법을 통해 기존 방법들보다 더 빠르고 효율적으로 고화질의 새로운 시점 뷰를 생성할 수 있음을 다양한 데이터셋에서 검증.


1. Introduction
문제점
- 기존 NeRF 계열 방법은 고화질 novel view synthesis가 가능하지만, 렌더링 속도가 느림 (주로 MLP와 ray marching 사용).
- 속도를 높인 방법들은 품질이 떨어지거나 실시간으로 렌더링 불가능.
- 특히 unbounded scenes와 1080p 고해상도 환경에서는 real-time 렌더링이 어려움.
해결 방법 (3가지 핵심 요소)
- 3D Gaussian Representation 도입
- 기존 NeRF처럼 연속적 표현이 가능하면서도, 포인트 기반 구조로 효율적.
- SfM(SfM으로 얻은 sparse point cloud)으로 초기화 후, 3D Gaussian으로 scene을 표현.
- Differentiable volumetric representation과 효율적인 rasterization을 동시에 가짐.
- 3D Gaussian의 속성 최적화
- Gaussian의 3D 위치, 불투명도(α), 비등방성 공분산(anisotropic covariance), SH(spherical harmonic) 계수를 최적화.
- adaptive density control 기법과 병행하여 Gaussians의 수를 동적으로 조절.
- Tile-based fast rasterization
- GPU 친화적인 tile-based splatting을 이용해 실시간 렌더링.
- visibility ordering을 고려한 anisotropic splatting을 통해 빠르고 정확한 backward pass 가능.
기여 (Contributions)
- 비등방성 3D Gaussian을 이용해 고품질, unstructured radiance field 표현 제안.
- adaptive density control과 interleaved optimization을 통한 효율적 최적화.
- GPU friendly한 real-time rendering 달성 (SOTA 수준의 품질, ≥ 30fps, 1080p).
2. Related works
2.1 Traditional Scene Reconstruction and Rendering
- 초기 novel-view synthesis 방법은 light field 기반 → dense하게 샘플링 필요
- Structure-from-Motion (SfM) → sparse point cloud를 추정하여 multi-view로 3D scene 복원
- 이후 Multi-View Stereo (MVS) → full 3D reconstruction 가능
- 이런 방식들은 geometry에 의존 → geometry가 없는 부분은 복원 어려움 & 과도한 재구성(Over-reconstruction) 문제
- Neural rendering 방법들이 등장하며 기존 방식보다 artifact 감소 & 효율적 메모리 사용
2.2 Neural Rendering and Radiance Fields
- 초기 neural rendering은 CNN 기반으로 novel-view synthesis 진행 → geometry 기반 제한성
- Volumetric radiance fields (NeRF 등) → continuous differentiable density field를 사용
- NeRF의 장점:
- 고품질 view synthesis 가능
- importance sampling, positional encoding으로 품질 향상
- 단점:
- MLP 사용 → 매우 느림 (training, rendering cost ↑)
- stochastic sampling 필요 → 시간 소모 & 노이즈 발생
- 최근 방법들은 fast training & rendering을 위해 spatial data structure (voxel, hash grid 등) 사용
- 하지만 여전히 high-res rendering에 한계
- 대부분 volumetric ray-marching 사용 → 실시간 불가능
2.3 Point-Based Rendering and Radiance Fields
- Point-based rendering:
- 명시적 point 표현 사용 → unstructured
- fast GPU rasterization에 적합, 그러나 discontinuity & hole 문제
- 최근 differentiable point-based rendering:
- CNN 활용하여 novel view synthesis 가능
- MVS 의존성 여전
- NeRF와 비교:
- NeRF는 volumetric & continuous → random sampling 필요
- Point-based는 unstructured explicit representation → fast but detail 부족
- Gaussian Splatting:
- Point-based rendering에 volumetric radiance field 개념을 결합
- Gaussian α-blending & visibility ordering 사용 → high quality + real-time rendering 가능
Overview

- 입력: 여러 장의 static scene 이미지를 SfM(Structure-from-Motion)을 통해 camera calibration → sparse point cloud 획득
- 이 point cloud로부터 3D Gaussians 생성 (각 Gaussian은 position, covariance, opacity α로 정의)
- Anisotropic volumetric splats 사용 → fine structure를 compact하게 표현 가능
- Radiance field의 색 정보는 Spherical Harmonics (SH)로 표현
- 전체 과정:
- 3D Gaussian의 position, covariance, α, SH coefficient를 반복적으로 최적화
- 중간에 adaptive density control 수행 (필요시 Gaussian 추가/제거)
- 핵심 효율성:
- Tile-based rasterizer 사용 → anisotropic splats를 빠르고 정확하게 α-blending하여 visibility 보장
- Fast backward pass 가능 (α 누적값 추적) → gradient 받을 Gaussian 개수 제한 없음



4. Differentiable 3D Gaussian Splatting
- 목표: SfM에서 얻은 sparse point cloud로부터 normals 없이 고품질의 새로운 뷰를 생성하는 장면 표현 최적화.
- 왜 Normal을 사용하지 않는가?
- 기존 point-based 방법은 각 포인트의 normal (법선벡터) 을 이용해 평면적으로 해석했지만, SfM 포인트는 너무 희소해서 normals 추정이 어렵고, noisy.
- 따라서 법선 추정 없이 사용할 수 있는 3D Gaussian 을 사용.
- 3D Gaussian 사용 이유
- 연속적인 volumetric 표현의 특성을 가지면서, 구조화되지 않고(explicit), 빠른 렌더링 가능.
- 2D splat으로 쉽게 투영 가능하고, α-blending으로 빠르게 렌더링 가능.
- 3D Gaussian 정의
- 위치(μ), 전체 3D covariance matrix Σ, 불투명도 α로 표현.
- Σ는 물리적으로 positive semi-definite (양의 준정부호) 이어야 함 → 일반적인 gradient descent로는 최적화 과정에서 유효한 covariance를 유지하기 어려움.


- 대신, 직관적이고 효율적인 표현 방식 사용
- Scaling matrix S (크기 조절)와 Rotation matrix R (회전)을 이용해 Σ 표현.
- Σ = R S Sᵀ Rᵀ
- 파라미터 최적화 시 scaling vector s와 quaternion q로 저장해 독립적으로 최적화.
- Σ = R S Sᵀ Rᵀ
- Scaling matrix S (크기 조절)와 Rotation matrix R (회전)을 이용해 Σ 표현.

- 최종적으로
- 다양한 형태의 geometry에 잘 적응할 수 있도록 anisotropic covariance 를 학습.
- 이는 captured scene을 상대적으로 compact하게 표현 가능하게 함.

5. Adaptive Density Control of 3D Gaussians
- 핵심은 3D Gaussian 파라미터 최적화를 통해 free-view novel view synthesis가 가능하도록 장면을 정확히 표현하는 것.
- 최적화하는 파라미터:
- 위치 (p)
- opacity (α)
- 공분산 행렬 (Σ)
- Spherical Harmonics (SH) 계수 → 각 Gaussian의 색상 (c) 표현
- 이 최적화 과정은 Gaussian 밀도 제어 (adaptive density control) 단계와 번갈아 수행됨.
- 필요 시 Gaussian을 추가하거나 제거하여 장면을 더 잘 표현할 수 있도록 함.
5.1 Optimization
- 최적화 과정
3D Gaussian들의 위치, α(불투명도), 공분산 Σ, SH 계수(색상)를 최적화하여 장면을 정확히 재구성하고 free-view synthesis가 가능하도록 함. 최적화 과정은 반복적으로 렌더링 결과와 ground-truth 이미지를 비교하면서 진행됨. - Geometry 오류 수정 3D-2D 프로젝션의 모호성 때문에 geometry가 잘못 배치될 수 있으므로 geometry를 새로 만들거나 (create), 제거하거나 (destroy), 이동 (move)하는 과정이 필요.
- Compact Representation Large homogeneous areas는 소수의 큰 anisotropic Gaussian으로 표현되기 때문에 compact한 표현을 위해 covariance의 품질이 중요.
- 최적화 방법
- Stochastic Gradient Descent (SGD) 사용
- CUDA 가속 및 custom kernel을 활용하여 효율적으로 최적화 수행
- Fast rasterization 알고리즘을 사용하여 최적화의 computational bottleneck을 해결
- 활성화 함수
- α 값은 [0, 1] 범위로 제한하기 위해 sigmoid 함수 사용
- 공분산 크기(scale)는 exponential activation 사용
- 초기화
- 공분산 행렬은 초기 isotropic Gaussian으로 설정 (가장 가까운 3개 포인트의 거리 평균 기반)
- 위치는 exponential decay schedule로 업데이트
- L1 loss 와 D-SSIM (Structural Similarity) 의 가중합 사용
- λ = 0.2 사용Loss Function

5.2 Adaptive Control of Gaussians

- 필요성
초기 SfM 포인트는 sparse하기 때문에, 단순히 Gaussian들의 위치와 크기만 최적화하면 fine details를 담기 어려움.
→ 따라서 adaptive하게 Gaussian의 수와 밀도를 조절하는 과정이 필요. - 방식
- Densification (추가)
새 Gaussian 추가: 특정 영역에서 geometry와 appearance의 복잡도가 높으면 새 Gaussians를 추가해 세밀하게 표현.- 주로 학습 초기에 많이 추가됨.
- Pruning (제거)
불필요한 Gaussian 삭제: 투명도가 낮거나 기여도가 낮은 Gaussian을 제거하여 연산 효율성 확보.- 주로 학습 후반에 많이 제거됨.
- Densification (추가)
- Trigger 조건
- 일정 에폭마다, 또는 최적화 과정에서 특정 조건 만족 시 자동으로 추가/삭제 수행.
- 주로 렌더링된 이미지와 GT 이미지의 차이를 기반으로 판단.
- 장점
- 복잡한 영역은 더 촘촘하게, 단순한 영역은 더 sparsely 표현 가능.
- 최적화된 Gaussians의 수를 1~5 million 범위 내로 유지 가능
- 컴팩트하고 효율적인 표현을 달성할 수 있음.
6. Fast Differentiable Rasterizer for Gaussians

1) 타일 기반 정렬 (Tile-Based Sorting)
- 화면을 16×16 tiles로 나눔.
- View frustum (카메라의 시야 영역)과 비교해 99% confidence interval 내에 위치하는 Gaussian만 남기고, 나머지는 버림.
- Near plane에 너무 가까운 Gaussians와 Frustum 밖에 있는 Gaussians은 projection 불안정성 때문에 제거.
- 각 Gaussian이 overlap하는 tile들의 리스트를 만들고, tile ID + depth를 기준으로 Radix sort를 통해 sorting.
2) Forward pass에서 α-blending
- 정렬된 리스트를 따라 front-to-back으로 Gaussian의 α 값을 누적하며 blending.
- α가 1에 도달하면 해당 pixel에 대한 blending은 중지.
- 이전 방법들보다 더 많은 blended Gaussians를 허용해 복잡한 씬에서도 성능 저하 없이 수행 가능.
3) Backward pass에서 gradient 계산
- Forward pass에서 사용된 tile 리스트와 정렬된 Gaussians를 그대로 재사용해 back-to-front로 traversal.
- Forward pass에서 최종 α 값을 저장해두고 backward 시 사용.
- 각 point의 α로 나눠주어 gradient 계산 시 필요한 coefficient를 얻음.
- 메모리 효율을 위해 forward pass에서 blended된 point의 full sequence를 저장하지 않고 traversal로 대체.
# Algorithm

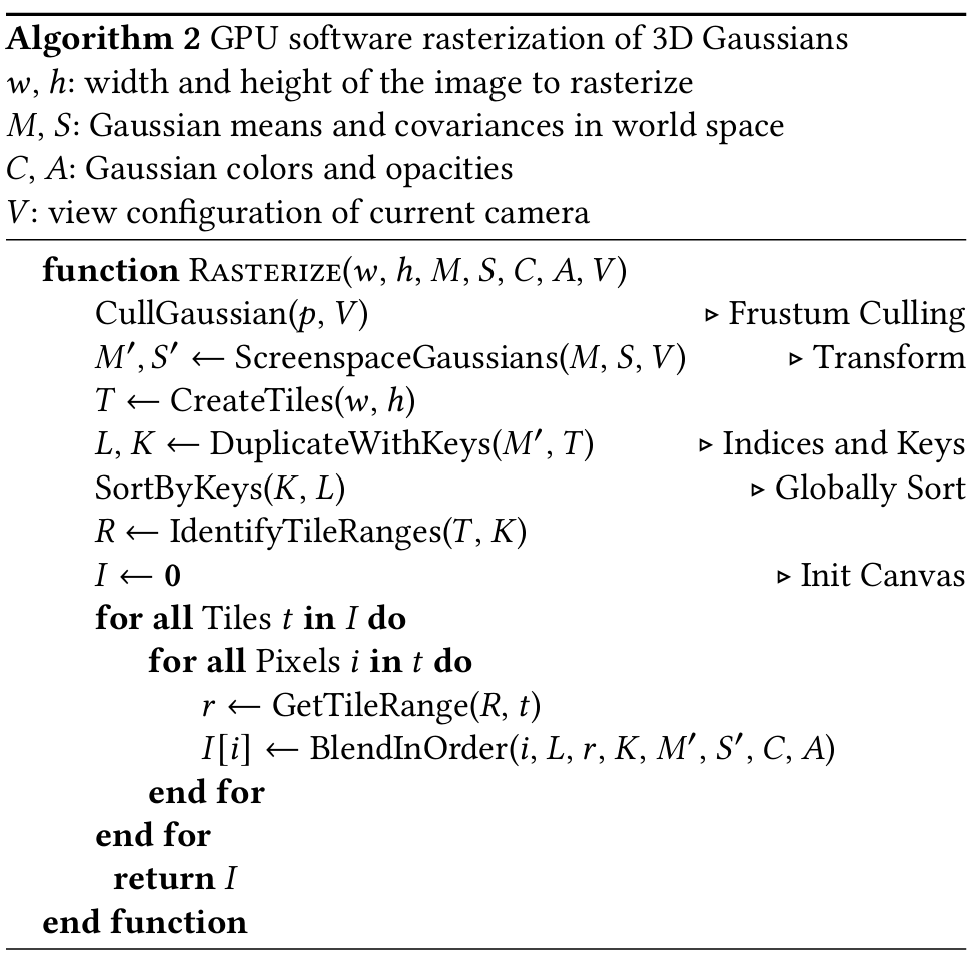
7.1 Implementation
- 구현
- Python + PyTorch로 구현.
- Rasterization은 기존 방법을 확장하여 custom CUDA kernel로 작성.
- Fast sorting을 위해 NVIDIA CUB의 Radix sort 사용.
- 결과 확인을 위해 SIBR interactive viewer 사용.
- Optimization Details
- Stability 확보를 위해 low resolution에서 warm-up 후 high resolution으로 업샘플링:
- 초기에는 해상도를 4배 낮춰서 250~500회 iteration 진행.
- 이후 2배 업샘플링, 다시 250~500회 iteration.
- SH coefficient optimization의 어려움:
- 시야각 정보 부족 시 (ex. 장면 한쪽 모서리 촬영, inside-out capture) SH의 zero-order component (diffuse color)가 왜곡됨.
- 이를 방지하기 위해 초기에는 zero-order component만 최적화하고, 이후 1000 iteration마다 SH의 band를 하나씩 추가하여 최종적으로 4 bands 사용.
- Stability 확보를 위해 low resolution에서 warm-up 후 high resolution으로 업샘플링:
7.2 Results and Evaluation
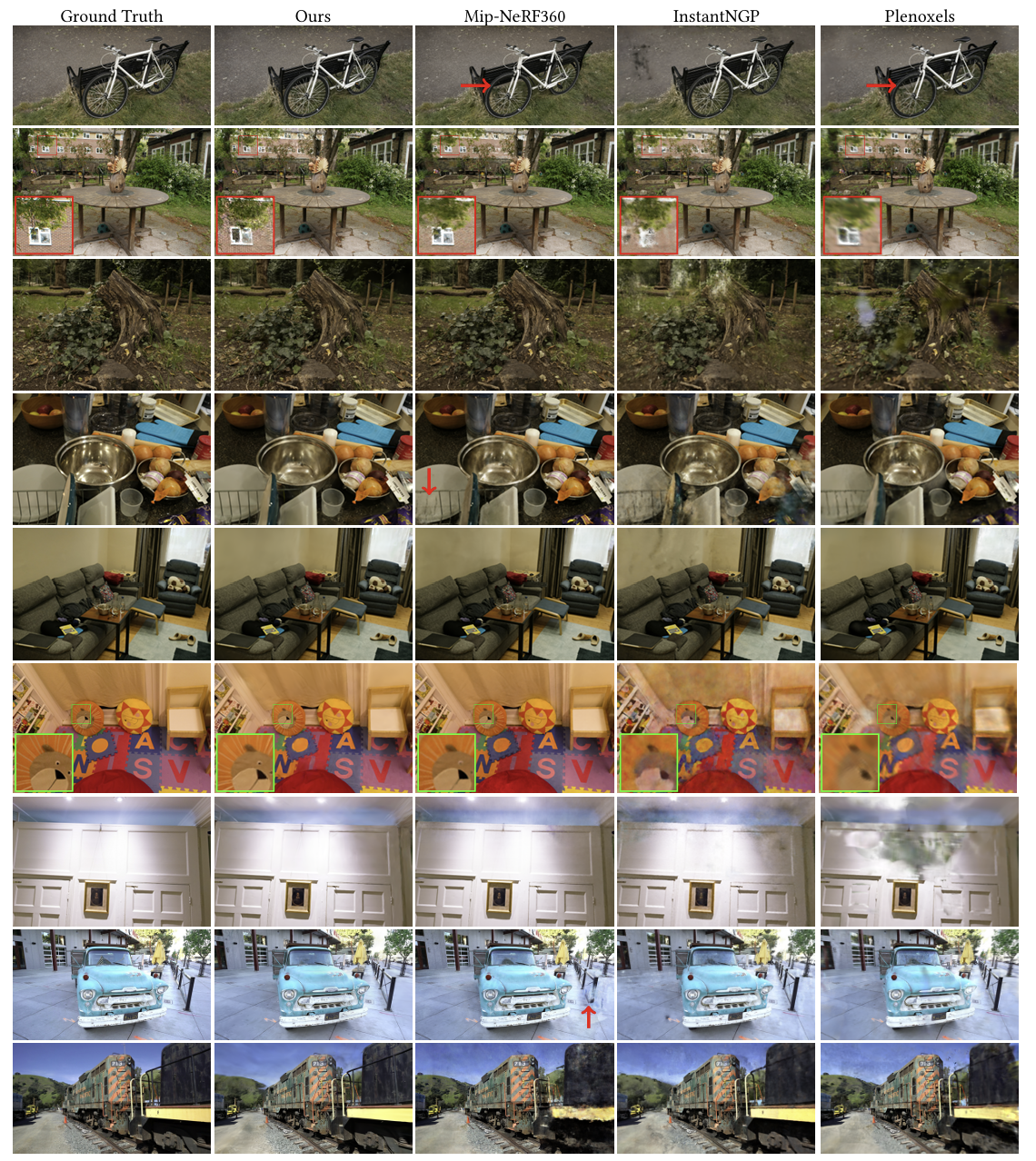
전체 평가
- 총 13개의 실제 장면과 Blender synthetic dataset을 사용하여 평가.
- 주요 비교 대상:
- Mip-NeRF360 (최신 SOTA NeRF 렌더링 품질)
- 빠른 NeRF 방법들: InstantNGP, Plenoxels
- 동일한 하이퍼파라미터 설정으로 모든 실험 진행.
실제 장면 (Real-World Scenes)

- 품질: Mip-NeRF360과 동등하거나 약간 더 좋은 품질.
- 학습 시간:
- Mip-NeRF360: 48시간
- 제안 방법: 35~45분
- 렌더링 속도: 10초/프레임
- 빠른 NeRF 방법 (InstantNGP, Plenoxels) 대비:
- 초반 5~10분만으로도 이들과 비슷한 품질.
- 추가 학습을 통해 SOTA 품질까지 도달 (빠른 NeRF 방법은 추가 학습해도 품질 한계 있음).
- 특이점:
- 기존 방법들은 먼 거리에서 세부 정보가 깨짐.
- 제안 방법은 먼 거리에서도 고해상도 세부 정보 유지.
Synthetic Bounded Scenes (Blender Dataset)

- 초기화: 10만 개의 랜덤 Gaussian으로 시작.
- 최종 학습 후:
- 6천~1만 개 meaningful Gaussians으로 pruning.
- PSNR 측정 기준으로 기존 방법과 SOTA 품질 도달.
- 모델 compactness: 최종 모델 크기 200k~500k Gaussians/scene.
Compactness (모델 크기)
- 기존 explicit scene representation (Zhang et al. 2022) 대비:
- 1/4의 파라미터 수로 동일 PSNR 품질 달성.
- 평균 모델 크기: 3.8MB (기존 방법: 9MB)
- 단, SH 계수는 두 차수(degrees)만 사용 (기존과 동일 조건).
7.3 Ablation Study

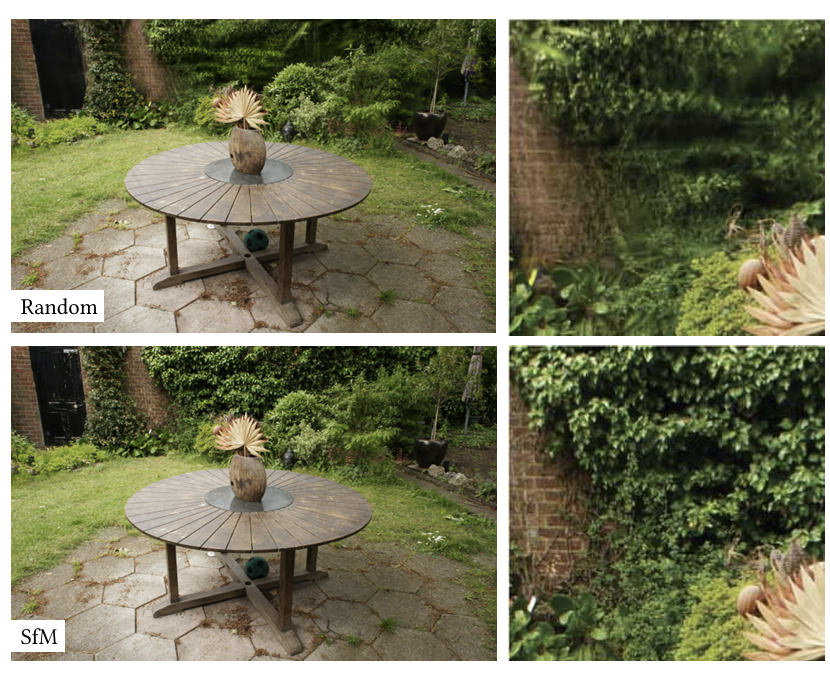
1. Initialization from SfM
- 기본적으로 Structure-from-Motion (SfM)에서 얻은 sparse point cloud를 초기화로 사용.
- 이를 사용하지 않고 랜덤 초기화하면:
- 성능은 크게 떨어지지 않지만, 특히 background에서 품질 저하가 발생.
- 더 많은 floaters (실제 geometry에 대응하지 않는 쓸모없는 Gaussian들) 발생.
- NeRF synthetic dataset에서는 background가 없기 때문에 이 영향이 없음.
2. Densification
- Gaussian을 추가하거나 나누는 Clone & Split 전략을 평가.
- Split을 비활성화하면 background 재구성 품질이 떨어짐.
- Clone을 비활성화하면 가느다란 구조 표현에 어려움.
- 두 방법 모두 빠르고 좋은 수렴을 위해 중요.
3. Unlimited depth complexity of splats with gradients
- 기존 방법은 특정 depth 이후 splat들에 대해 gradient 계산을 제한했지만,
- 본 논문에서는 제한을 두지 않고 모든 splat에 대해 gradient 업데이트 가능.
- 실험적으로 제한을 두면 학습 품질이 크게 저하되고 (PSNR -11dB), 최적화가 불안정해짐.
4. Anisotropic Covariance
- Gaussian의 공분산을 단일 scalar로 제한하는 경우와, full anisotropic covariance를 사용하는 경우를 비교.
- Full covariance 사용 시 geometry에 더 잘 align되고, 더 적은 수의 Gaussians으로 더 높은 품질의 렌더링 가능.
5. Spherical Harmonics
- SH (Spherical Harmonics)를 사용하여 view-dependent appearance 표현.
- SH를 제거하면 PSNR 성능이 감소.
- SH는 관측 방향에 따라 색상이 달라지는 효과를 잘 표현하기 위해 필요.

7.4 Limitations
1. 관찰 부족 영역에서의 문제
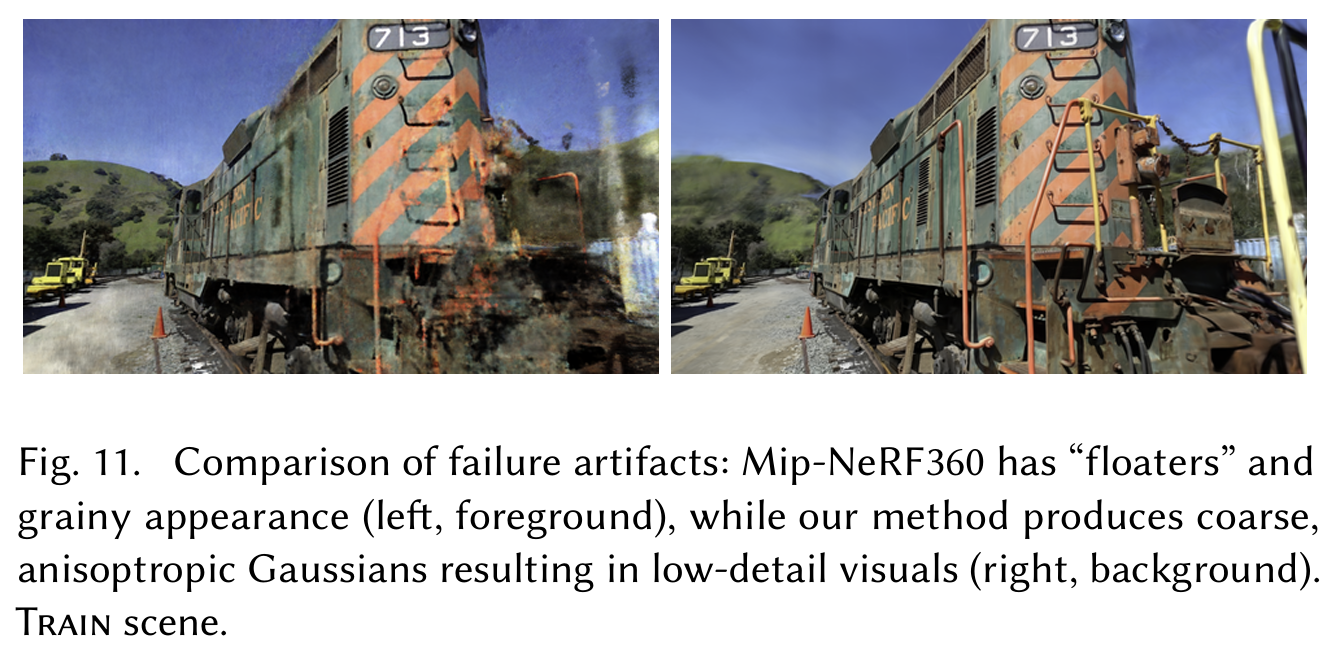
- 장면(scene)을 충분히 관찰하지 못한 영역에서는 artifact(잡음, 이상현상)이 발생함.
- 이는 Mip-NeRF360 같은 다른 최신 방법들도 겪는 문제로, 이 논문만의 한계는 아님.
- 특히 anisotropic Gaussians가 장점도 있지만, 잘못 최적화되면 늘어진(splotchy) 형태의 Gaussian이 생길 수 있음.
2. Popping artifacts

- 최적화 중 큰 Gaussian이 생성되면 시점에 따라 갑작스럽게 보이거나 사라지는 (popping) 문제가 생김.
- 이유:
- 단순한 guard band 기반 rejection: tile 밖에 위치한 Gaussian을 무조건 제거.
- simple visibility algorithm: Gaussian의 깊이 정렬 순서가 갑자기 바뀌는 문제 발생 → blending 순서 변경.
- 해결 방향: 더 정교한 culling/visibility 알고리즘 또는 anti-aliasing 기법 필요.
- 현재는 regularization 적용이 없어 이러한 문제를 완화하기 어려움.
3. 대규모 장면 학습의 어려움
- 모든 실험에 동일한 하이퍼파라미터 사용했으나, **복잡한 도시 장면(urban scenes)**에서는 position learning rate를 낮춰야 수렴이 잘 됨.
- 즉, 복잡한 장면에 대한 일반화 어려움이 있음.
4. 높은 메모리 소비
- 기존 포인트 기반 방법보다 메모리 효율은 높지만,
- NeRF 기반 방식보다 GPU 메모리 사용량이 훨씬 많음 (최대 20GB까지 사용).
- 특히 훈련 중엔 많은 메모리 소비, 추론 중에도 수백 MB~GB 단위의 메모리 필요.
- 타일 기반 rasterizer만 해도 30~500MB 정도 필요함.
💡 개선 방향 제안
- 더 정교한 구현으로 메모리 최적화 가능 (예: InstantNGP 방식처럼).
- 압축 기법 (e.g. point cloud compression) 적용 가능성도 제시됨.



