
https://arxiv.org/pdf/1711.10684
Abstract
- Road extraction은 원격 감지 이미지 분석 분야의 뜨거운 연구 주제
- Residual learning과 U-Net의 결합 구조를 통해 Road extraction 수행
1) Residual unit은 Deep network의 training이 더욱 쉽게 이루어지도록 함.
2) Skip connection은 information propagation을 통해, 더 적은 parameter로 더 좋은 성능을 보임. - Public road dataset을 분석하는 연구에서, 다른 network에 비해 ResUNet이 더 좋은 성능을 보였음.
1. Intorduction
Road extraction
원격 감지 분야의 대표적인 기술로, 자동화 네비게이션, 무인 자동차, 도시 설계, 지리 정보 업데이트 분야 등 다양한 기술에 적용 가능한 분야이다. 하지만 고해상도의 이미지를 원격으로 감지하는 기술은 여전히 어려움이 많은데, 대표적으로 noise, occlusion(다른 객체에 의해 물체가 가려지는 현상), Background의 복잡도 등의 과제가 남아있다.
이 중 Road area extraction은 이미지에서 도로가 차지하는 영역을 감지하는 기술로, pixel 단위의 labeling을 필요로 한다. 따라서 Segmentation, 또는 Pixel-level classification problem을 해결하는 방식으로 접근할 수 있다. Segmentation 문제를 해결하는 여러 가지 전통적 방법 (SVM, hierachical graph-based image segmentation 등)이 고안되었으나, 그 중에서 Deep Learning을 적용한 방식에서 높은 성능과 잠재력을 보였다.
- Minh and Hinton : Restricted Boltzmann machine (RBMs) 적용, pre-processing (차원 축소), post-processing (불완전한 영역 후처리) step 적용
- Saito et al. : Convolutional Neural Network (CNNs) 적용, 높은 성능을 보임.
Deep Learning은 높은 성능을 내기 위해서 Layer를 여러 개 사용하는 Deep architecture를 사용하나, vanishing gradient 등의 문제가 발생함. 이를 해결하기 위한 대표적인 architecture가 Deep residual learning과 U-Net임.
- Deep residual learning framework (He et al.) : Identity mapping을 활용하여 skip connection 구현
- U-Net (Ronneberger et al.) : 다양한 level의 feature map을 합하여 low level detail information과 high level semantic information이 결합된 정보 추출, biomedical image segmentation에서 높은 성과
Deep residual U-Net (ResUNet) : Deep residual learning과 U-Net에서 영감을 받아 설계된 구조. 두 가지 구조의 이점을 모두 취함.
- U-Net과 달리 1) residual unit를 basic block으로 사용하며, 2) cropping operation 과정이 불필요함.
2. Methodology
A. Deep ResUnet
1) U-Net : low level detail + high level semantic information
- Data augmentation을 통해 제한된 data 양을 증대
- Infromation propagation : low level feature를 대응하는 high level에 전달 → training 도중 backward propagation이 가능, high level semantic feature에 low level detail이 더해짐
2) Residual unit : training이 효과적으로 이루어지고 Degradation problem 해결
- Multi-layer neural network로 인해 발생한 문제 극복
- Residual unit으로 구성 : $\mathcal{F}$(residual function), $f$(activation function), $h$(identity mapping function)
- Batch normalization, ReLU activation, Convolutional layer의 조합으로 이루어짐

3) Deep ResUNet : U-Net과 residual neural network를 결합 → training이 쉽게 이루어지도록 하고 Information propagation을 통해, 더 적은 parameter로 더 좋은 성능을 보임.
- 총 7 level architecture, 3개의 part로 나뉨 : Encoding, Bridge, Decoding
- Encoding : Input image를 compact representation으로 변환
- Decoding : pixel-wise categorization (=Semantic segmentation) 이미지로 변환
- Bridge : encoding과 decoding을 연결

- Residual unit으로 구성 : 3x3 convolution block, identity mapping
- Encoding : 3개의 residual unit, pooling downsampling 대신 stride 2 convolution 사용
- Decoding : 3개의 residual unit, 각 unit에 진입하기 전 upsampling + encoding feature map concatenation 수행
- 마지막 레벨에서는 1x1 convolution, sigmod activation layer 통해 multi-channel feature map 생성
- UNet(23)에 비해 15개의 적은 convolution layer 사용, cropping 불필요

B. Loss fuction
parameter $W$ 추출, $Net(I_i;W)$와 ground truth $s_i$ 간의 차이 최소화 → MSE 사용, SGD로 최적화
- 다른 derivable loss function 역시 사용 가능 (U-Net은 pixel-wise cross entropy 사용)

C. Result refinement
Input, Output 동일하게 224x224 size. Overlap strategy 이용 (Boundary 부분의 정확도 상승)
3. Experiment
- Massachusetts roads dataset 사용. Mnih’s method (RBMs), Saito’s method (CNN), U-Net과 비교
- Relaxed precision, recall 수치 및 break-even point 비교
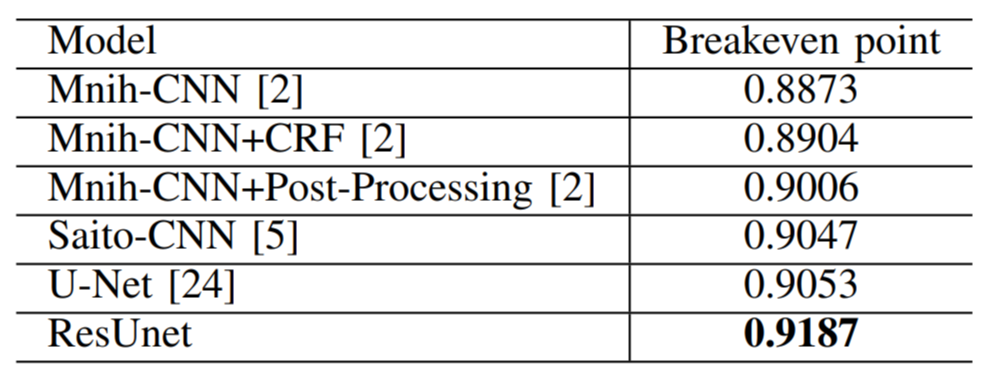

- Deep ResUNet이 높은 relaxed precision, recall 수치, 가장 좋은 성능을 보임.
- UNet에 비해 parameter는 1/4 정도이지만 높은 성능을 보임.

- ResUNet에서 수행한 segmentation이 가장 높은 성능을 보임 : 적은 Noise, 교차 도로에서 깔끔한 처리
- Context information를 고려 : 특징이 비슷한 물체와 구별, Occlusion 해결, Parking lot 내부의 도로는 인지하지 않음
4. Conclusion
- 고해상도 원격 감지 이미지 분야에서 ResUNet를 적용시켰을 때, Residual learning과 U-Net의 장점을 모두 취할 수 있음
- Residual unit의 skip connection과 U-Net의 information propagation은 training을 쉽게 할 뿐만 아니라 간단하고 강력한 neural network를 형성할 수 있었음
- parameter 수가 적음에도 불구하고, 다른 모델에 비해 높은 성능을 보임.


